


说明:土-结构相互作用性能试验平台用于开展模拟软土地基与结构相互作用的相关试验。可模拟动静态加载方式,加载方式包括空间静压、锤击和振动等方式,实现对基础设施(如桩、基础、柱、梁、框架等)的模拟加载,从而开展结构的压缩、拉伸、弯曲、疲劳等力学性能试验。
购买咨询一、项目分析
设备需求:土-结构相互作用性能试验平台,1套。
功能需求:用于开展模拟软土地基与结构相互作用的相关试验。可模拟动静态加载方式,加载方式包括空间静压、锤击和振动等方式,实现对基础设施(如桩、基础、柱、梁、框架等)的模拟加载,从而开展结构的压缩、拉伸、弯曲、疲劳等力学性能试验。同时配套动静态数据采集系统、高速摄像和三维DIC应变测量系统,实现加载过程中土-结构试验数据的采集分析。
二、主要技术参数
1.动静态电液伺服加载系统
1.1主机框架1套,提供垂向加载点2个、水平向加载点2个。(注:垂直和水平加载点都可以活动,根据被试验产品进行调整间距。)
1.1.1框架结构:垂直较大承载≥400kN;较大垂向空间净高度:3500mm;框架柱跨距:5000mm;
1.1.2框架整体刚度:较大负载下横梁变形不大于跨距的1/2000;
1.1.3支持垂向和水平向动静耦合加载:垂向支持2点加载,水平向支持2点加载,一个垂向加载点与一个水平向加载点耦合。
1.1.4水平向加载点高度可调:较低-1000mm,高2000mm;
1.1.5水平向加载点端部距离可调:最短1000mm,最长3000mm;
1.1.6垂向加载点高度可调:垂向加载点端部较低0mm,高2500mm;
1.1.7垂向加载点延土槽纵长度方向位置可调;
1.1.8垂向和水平向加载作动器和反力架连接支持微调滑动:滑动行程不小于±250mm;
1.1.9安装布置:布置于试验土槽周边(土槽体积4米宽、4米长、3米深)。
1.2 100kN 电液伺服动态作动器(4套)
1.2.1电液伺服动态作动器负荷:拉、压荷载≥100kN;
1.2.2试验负荷测量范围与精度:2%~100%FS, 精度误差≤±0.5%;
1.2.3作动器行程:不小于±300mm;
1.2.4位移传感器测量精度:≤0.2%FS;
1.2.5作动器位移分辨率:≤0.01mm;
1.2.6高性能内置 LVDT 位移传感器,行程:≥400mm;
1.2.7高性能 100kN 动态负荷传感器,精度:≤0.05%;
1.2.8作动器加载频率:0.01~20Hz;
1.2.9结构连接方式:尾部法兰连接,端部拉压无间隙万向球铰。
1.3.落锤冲击加载装置1套
1.3.1较大冲击能量:40000J;
1.3.2较大锤体质量:2000kg;
1.3.3冲击高度:1000~2500mm;
1.3.4锤体规格:50kg起始,模数100kg,较大550kg;500kg起始,模数500kg,较大2000kg;
1.3.5提锤速度:≥5m/min;
1.3.6其他:垂体具有防二次冲击功能,垂体带传感器,具有配套数据采集软件,可监测采集垂体冲击能量、起升高度、冲击瞬时较大加速度、速度等参数;落锤冲击加载装置与主机框架配合安装使用,且不影响垂向加载点的设置。
1.4.高频振动加载装置2套
1.4.1电动机功率:≥10千瓦;
1.4.2偏心力矩:≥6N·m;
1.4.3激振力:≥50kN;
1.4.4允许拔桩力:≥50kN;
1.4.5其他:配夹具,与主机框架配合使用,作动器较大频率≥20Hz。
1.5.电液伺服液压源1套
1.5.1系统工作流量:≥200L/min;
1.5.2系统工作压力:≥28MPa;
1.5.3电机“低压—高压”启动;
1.5.4高压滤油器的过滤精度:≤5μm;
1.5.5其他:能提供四个作动器同时按较大荷载做功,且该状态下连续工作1小时油温不大于50℃,冷却方式采用压缩机制冷;采用组合式节能设计,具有无级调压功能,液压系统参数(包括但不限于压力、油温、液位)数字化显示,全封闭设计,主控计算机远程监控操作。
1.6.动静态电液伺服控制器1套
1.6.1四通道高性能数字闭环运动控制器,每个作动器对应控制通道数:可实现四个作动器同步、异步加载控制;
1.6.2加载波形:正弦波、三角波、斜波、组合波等,具有疲劳试验谱、载荷试验谱和静力试验谱的编辑功能;
1.6.3采样频率:≥5kHz;加载频率:0.01~10Hz;
1.6.4位移测量方式:内置式 LVDT 位移传感器测量;
1.6.5位移测量分辨率:0.001mm;
1.6.6控制方式:负荷控制、位移控制,不同控制方式可以平滑切换;
1.6.7控制系统:开环闭环可选,对试验全过程进行监控、自动全程测量、存储试验数据、自动绘制、存储试验曲线等;具有完整的文件操作及数据存储功能,数据可以多种文件格式保存,试验结束后数据可导入在Word、Excel等多种软件下进行处理;可以动态实时显示各类试验数据,并实时绘制时间-试验力、时间-位移、位移-试验力等常规曲线,且具有曲线局部放大或还原,同组曲线叠加对比,用鼠标可在曲线上得到任意采样点的坐标值(x,y)等功能;控制软件支持设定系统控制参数(包括但不限于加载相关参数、卸载时间、试验开始点、传感器的零位及增益进行传感器的标定等);支持系统安全保护软件(包括但不限于超载保护,油缸行程限位保护,液压系统较大压力保护以及过流和过速等过载保护功能);支持系统诊断(检测系统的各类硬件故障);支持通道分配,可随意设定试验所占用的通道;
1.6.8其他:必要的配套软硬件(包括但不限于计算机、数据采集和处理系统、配套软件包、控制柜以及电缆线)、电路改造。
2.动静态数据采集系统
2.1数据采集系统
2.1.1通道数(A/D转换器):≥24通道;
2.1.2数据总线传输方式:PXIe;
2.1.3采集到的原始数据直接传输到机箱主板;
2.1.4每通道高采样速率:≥5MS/s,通道隔离电压不低于350V;
2.1.5系统包含不少于4路CAN通道,8路计数器通道;
2.1.6支持电压、ICP、桥路(全、半、1/4桥)、电流(电流精度不低于0.1 %,读数±10 μA)、铂电阻、电阻、热电偶、电荷、LVDT等信号输入,电压量程多档可调(不低于100V输入,精度不大于0.02%,读数±0.02%,量程±20 μV);
2.1.7具备自检功能和支持对智能传感器的参数自动读取;
2.1.8操作终端:配置高性能便携式操作终端1台(不低于:处理器I7,内存32G,存储2T)。
2.2传感器
2.2.1加速度传感器5只(带20米电缆):轴向3(X/Y/Z),量程≥100g,允许过载不小于20倍,精度不大于2.5%,频响DC-2KHz,迟滞<0.1%满量程,灵敏度变化≤0.06%/℃,重量不大于28g,需给出加速度传感器安装方式、安装角度范围、以及较大承受的极限加速度和运输过程中允许的较大冲击加速度;
2.2.2土压力传感器 8只:量程0-2MPa,适用于动、静态模型试验和现场试验,外形不大于于15mm,精度±0.25%F·S,分辨率不低于0.2%F·S,过载能力在额定范围内的120%,防水性要求可在饱含水的介质中工作;
2.2.3孔隙水压力传感器 8只:量程0-2MPa,分辨率0.1KPa,精度±0.1%F·S(包括非线性、迟滞性和重复性),过压系数不小于较大量程的2倍,采用不受横向压力影响的双重结构;
2.2.4激光位移计 5只:测量中心距离200mm,测量范围±80mm,重复精度200微米,线性±0.2%F·S,0-5V电压输出;
2.2.5含水量探头 5只,量程0-100%,分辨率:0.1%。
三、高速摄像及三维DIC应变测量系统
3.1硬件技术指标要求:
3.1.1分辨率≥1280*1024,满幅帧率≥15000fps,高帧率≥1060000fps;
3.1.2 像元尺寸≥15um;
3.1.3 最短曝光时间≤100ns;
3.1.4 支持 PIV 跨帧曝光,极限双曝光时间≤150ns,可用于PIV、PTV等非接触测量;
3.1.5 一体式机身自带高速RAM存储,内存容量≥190GB,可扩展选配较大容量20TB内置实时写入存储盘;相机内存支持自定义分区,且内存空间支持非均匀分配;
3.1.6高速相机应用于DIC实验时,可由DIC软件直接控制,采集与分析使用同一个软件;
3.1.7支持跨网段搜索,跨网段修改相机网络IP地址便于用户首次连接设备时配置相机网段。相机自带WIFI功能,可通过手机、电脑等移动端上的网页浏览器登录进入相机,可对相机进行采集控制(提供截图或照片证明);
3.1.8相机可直接输出H264码流,支持在低带宽网络(低于50Mbps)传输环境下,仍可以流畅预览拍摄;视频保存格式支持RHVD /AVI /MP4 /BMP /JPG /TIFF /PNG,支持抽帧导出,自定义播放帧率导出,导出AVI视频格式时,导出的播放速度可选;
3.1.9脉冲信号输出和输入需要无延时性,采用双航插接口,接口为高端航插级别,航插为五针航插,相机外部支持一键关机,非插拔式关机,机身外部自带录制按钮,支持一键快速录制;
3.1.10采集时支持自动捕捉关键帧,回放时支持关键顺自动定位,支持自定义关键帧(关键帧事后编辑),支持关键帧前后视频选段导出,支持保存媒介选择(支持本地/CF 卡/SSD 卡);
3.1.11回放界面支持在进度条实时显示缩略图,便于客户定位关键目标;支持回放导出时候,勾选图像处理 (反色)功能(用户可通过勾选反色,呈现负片效果)(提供截图或照片证明);
3.1.12相机支持一键直连功能,支持跨网段搜索,支持EDR极限动态范围,开启该功能可在一帧之内完成从高曝光到低曝光的切换;
3.1.13支持对目标进行运动学跟踪,并可同时跟踪多个目标,可选单帧跟踪,多帧连续跟踪,跟踪精度可达0.1个像素,支持对跟踪目标进行手动修正,计算位移、速度、角度、加速度支持以图表、CSV、RHVD 格式导出,支持动态坐标系的建立,能够用于振动消除和相对运动分析;支持对刚体目标进行直线测量、角度测量和运动测量分析,支持静态角度包含2点与竖直方向、2点与水平方向、3点角度测量。支持可自动绘制出目标对象的运动轨迹,支持双目标定/双目分析,支持6DOF分析功能:支持输出质心x/y/坐标、俯仰角/偏航角/滚转角及其角速度、角加速度;提供第三方检测机构精度认证证书。
3.2.软件技术指标要求:
3.2.1系统支持测量试件的全场三维坐标(x,y,z坐标);三维位移(Dx,Dy,Dz,合位移等),拉格朗日应变EXX,拉格朗日应变EYY,拉格朗日应变EXY,拉格朗日*主应变E1,拉格朗日第二主应变E2,工程应变EXX,工程应变EYY,工程应变EXY,对数应变EXX,对数应变EYY,对数应变EXY,欧拉应变EXX,欧拉应变EYY,欧拉应变EXY,米塞斯应变,屈雷斯加应变;
3.2.2应变测量范围20μɛ~2000%ɛ、二维应变测量精度20μɛ、三维应变测量精度50μɛ、三维位移测量精度≤0.01像素;测量视场范围:20mm×20mm至10000mm×10000mm;
3.2.3具有疲劳采集模块功能,可直接在软件中调用疲劳采集模块:低频相机采集高频数据(只需一个周期或者多个周期采集一组数据),可在当前周期进行触发,自动识别波峰波谷,间隔一定相位进行采集,并实时矫正拉伸机信号变化带来的误差,消除累计周期误差的影响,采集过程中可变频采集图像,供DIC后处理分析;
3.2.4软件具备振动模态分析模块,可直接在软件中直接调用振动模态分析模块,计算分析物体振动过程的固有频率、阻尼比和振型,并能直接在软件中显示和导出振型动画;
3.2.5软件集成固体力学材料有限元仿真功能,满足任意三维、二维结构材料固体力学静力拉伸/压缩有限元仿真功能;能添加不低于10种材料参数功能;网格节点划分满足10万节点以上;有限元前处理建模可以通过拉伸、旋转、景象、缩放、偏置等操作得到面、体,可以直接构造矩形、多边形、圆、球、圆柱、圆锥、棱柱、圆环等;通过体面的布尔加、减、交等操作得到模型;可快速将几何模型自动离散成线单元、三角形单元、四边形单元、四面体单元、六面体单元等,并且可以根据用户的需要对网格进行局部的加密以及网格阶次的选择;软件需提供:IGES、DXF、Parasolid、VDA、STL、Nastran等接口;可将结果写成各种常用的图形文件如:BMP、GIF、TPEG、PNG、TGA、TIFF、VRML等格式,以及AVI、MEPG的动画格式。后处理支持的结果显示方式有:带状云图显示、等直线显示、切片显示、矢量显示、变形显示等(提供截图或照片证明);
3.2.6可得到空气流场和水流场的平面二维速度场和平面三维速度场数据,也可得到多相流的PTV数据,可扩展为体三维测试系统和微视场速度场测试模块,且具备固液两相分析功能,通过融合DIC和PIV实现固体变形场和液体流场的同步分析,支持二值图像的形态学处理,包括腐蚀、膨胀、开运算、闭运算, 支持空心气泡的孔洞填充功能,支持气泡面积的过滤功能, 支持气泡直径、面积、周长的测,支持稀疏气泡的速度、加速度的测提供(提供截图或照片证明);
3.2.7搭配光源灯头尺寸≤95.3*92*83mm,光源灯杯角度≥23°,工作距离300mm,照度≥450000lux,光源符合国军标 GJB 150.18A-2009 冲击试验,峰值加速度:200g,脉宽8ms,冲击波形:半正弦波,冲击方向:3轴6向。(提供第三方检测报告)
3.2.8搭配8通道输出同步控制器,高速相机采集软件可直接对外部同步控制器进行参数配置
3.2.9支持SDK二次开发,定制化SDK接口。
四、试验土槽及附属设施
4.1土槽开挖及周边加强:
4.1.1开挖土槽:总长16米,总宽4米,深度3米或2米(长4米×宽4米×深3米、长12米×宽4米×深2米),本系统使用长4m×宽4m×深3米的土槽范围;
4.1.2土槽内壁设置可移动插板2块(宽4米×长3米),配合土槽内壁插槽使用,使土槽沿长度方向可调节容积,该可移动插板预留钢化玻璃视窗,视窗范围不小于1米×0.3米,该可移动插板整体需能承受3米深的土压力作用;
4.1.3土槽周边地基加固:保障土槽结构可满足土槽内试验材料的填充及加载主机框架安装及加载要求,提供土槽地基加固方案及有限元分析;
4.1.4沿着土槽纵长方向两侧布置可移动龙门吊地轨(地轨长度不小于16米,适用于龙门吊起吊力不小于30吨;
4.1.5对土槽增加注水和排水系统,实现土体不同水位控制。现场使用不少于1吨的水箱进行水源供给,水压不小于0.5MPa,包含过滤系统,能实现循环使用。土槽底部预留集水槽,便于槽内泥土清理。
4.2附属配套
4.2.1供配电系统:满足系统全部电力负荷;
4.2.2控制室布置:配套临时控制室,布局本系统所涉及仪器的操作台、置物架。
3、设备组成
1) 动静态电液伺服加载系统。
2) 动静态数据采集系统。
3) 高速摄像和三维DIC应变测量系统。
4) 试验土槽及附属设施。
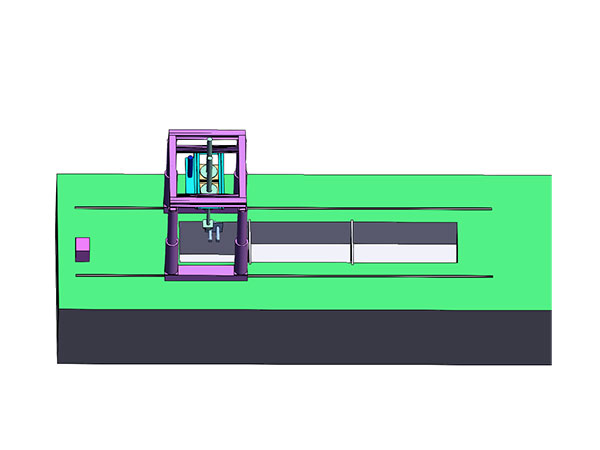
3.1 动静态电液伺服加载系统
3.1.1 主机框架

业务咨询:18702252422
Copyright © 2018 天津伟思实验仪器科技有限公司.版权所有 ![]()
服务热线







